Il Maser ad idrogeno è oggi il generatore di frequenza più preciso disponibile nei migliori laboratori del pianeta. Il prezzo fa il paio con quello con una buona Ferrari. Siccome di Ferraristi (inteso come possessori di Ferrari) purtroppo non ce ne sono poi tanti, è ben lungi da me proporre una “clonazione” di detto dispositivo, quanto piuttosto offrire spunti per realizzarsi in casa un buon riferimento di tempo e frequenza campione a costi “amatoriali”.
Fra le tante grandezze fisiche del nostro mondo, il tempo è quella può essere misurata colla migliore precisione. Restringendo lo sguardo al mondo elettrico, è la frequenza ovvero il periodo, la grandezza che meglio possiamo misurare nei nostri laboratori, anche in quelli più “domestici”.
La precisione di dette misure di tempo (periodo e frequenza) dipende principalmente dall’accuratezza del riferimento campione e di questi generatori ci occuperemo oggi.
Per accuratezza s’intende la precisione colla quale il campione si avvicina al valore corretto nel momento della misura. Questo dato, dipende da 3 fattori quali: precisione, stabilità a breve termine, stabilità a lungo termine.
La precisione è dovuta al dimensionamento delle parti circuitali e dalla loro corretta taratura.
Una volta che abbiamo un riferimento istantaneamente preciso, intervengono due fattori a deprimerne l’esattezza:
La stabilità a breve termine, indica la capacità a rimanere costante in un ristretto periodo d’osservazione, tipicamente minuti od ore. Questo parametro c’indica ad esempio, quanto, misure consecutive, o in breve successione, siano paragonabili fra loro.
La stabilità a lungo termine, indica la capacità a rimanere costante in un prolungato periodo di tempo, tipicamente mesi od anni. Questo valore indica invece quanto, misure eseguite a gran distanza temporale sono comparabili.
Vediamo ora quali prestazioni sono mediamente attendibili da diverse soluzioni, dalle più semplici ed economiche a quelle più sofisticate e costose:
|
Descrizione |
Prezzo [€] |
Stabilità a breve termine |
Stabilità a lungo termine |
|
Oscillatore quarzato semplice |
10-20 |
1 E –7 |
1 E –8 |
|
Oscillatore con quarzo termostatato |
50 – 100 |
3 E –8 |
5 E –8 |
|
Oscillatore a quarzo in cella termostatica |
200 – 500 |
2 E –10 |
3 E –10 |
|
Cella a Rubidio |
10k – 50k |
5 E –12 |
1 E –11 |
|
Cella a Cesio |
10k – 50k |
5 E –11 |
3 E –12 |
|
Maser ad idrogeno |
100k – 300k |
1 E –13 |
1 E –11 |
Nota: i valori indicati sono validi per oscillatori ben regimati, non sottoposti a stress termici, ben alimentati e d’ottima qualità generale (componenti, layout, dimensionamento di base…).
Per prendere più confidenza con i numeri sopra riportati, vediamo a cosa corrisponderebbero se indicassero la precisione di un orologio:
|
Errore |
Errore temporale |
|
|
1E-07 |
== |
116 giorni per accumulare 1″ d’errore |
|
1E-08 |
== |
38 mesi per accumulare 1″ d’errore |
|
1E-09 |
== |
32 anni per accumulare 1″ d’errore |
|
1E-10 |
== |
317 anni per accumulare 1″ d’errore |
|
1E-11 |
== |
3.171 anni per accumulare 1″ d’errore |
|
1E-12 |
== |
31.710 anni per accumulare 1″ d’errore |
|
1E-13 |
== |
317.098 anni per accumulare 1″ d’errore |
E’ facile vedere com’errori di 10 parti su 1 milione vengono da soluzioni abbastanza semplici ed economiche, mentre volendosi spingere verso la 1 parte su un miliardo le cose cominciano a complicarsi, e soprattutto a divenire costose ed ingombranti.
Se in campo professionale e di laboratorio questo può non essere un problema, lo diventa senz’altro in campo domestico ed amatoriale.
Ben lo sanno ad esempio gli entusiasti di microonde, quando devono fare isoonda a 10 o 24 GHz.
In quel caso un errore di anche solo 1 parte su 10 milioni (ottimo oscillatore quarzato termostatato e regimato) può portare un disallineamento fra le stazioni corrispondenti di ben 1 kHz, talvolta sufficiente per fallire il collegamento.
Occorre poi considerare come sovente nell’uso amatoriale gli oscillatori contenuti negli apparati saranno soggetti alle sollecitazioni meccaniche del trasporto,a quelle di un funzionamento discontinuo, ad un’alimentazione non sempre stabile come necessario ed esposti a transitori termici importanti.
Che dire poi dei beacon a microonde? Situati in posti remoti, sottoposti a grandi stress termici stagionali, la loro stabilità di frequenza è sempre stata un grosso problema.
Col progressivo salire delle frequenze utilizzate nelle radiocomunicazione e la gran diffusione della SSB a 10 e 24 GHz, (ed anche più su…) le richieste amatoriali di precisione e stabilità sono cresciute rapidamente ed ora si attestano sui 10-100Hz @ 24 GHz. Questo, in altre parole, significa una precisione e stabilità di 1 parte su 1 miliardo.
Dalla tabella sopra riportata, la risposta tecnica più idonea sarebbe un oscillatore a Cesio o Rubidio.
Bene, ma, la precisione richiesta, dovrebbe essere disponibile ad un’utenza amatoriale, essere economica, facilmente trasportabile ed alimentabile.
Beh insomma…. tutto il contrario della soluzione tecnica più ovvia. Che fare dunque?
La tecnologia moderna fortunatamente ci offre oggi una soluzione che risponde a tutti requisiti desiderati: il GPS.
Il GPS, o Global Positioning System, è un sistema nato anni addietro per la localizzazione e navigazione sull’intera superficie terrestre del quale abbiamo tanto sentito parlare ed oggi (ad esempio) cuore di tutti i navigatori per autovettura.
Oltre a fornire in uscita la posizione in 3D (latitudine, longitudine, quota), rende disponibile anche un altro segnale, detto PPS o pulse per second.
Ed è proprio questo segnale che andremo a sfruttare per generare un ottimo riferimento di tempo campione.
Non tutti i GPS hanno questa linea disponibile all’utente, (ad esempio quelli per trekking o navigazione in auto) ma tutti lo usano al loro interno.
Occorrerà quindi procurarsi un modulo GPS con questo segnale facilmente accessibile.
Il costo di detti dispositivi è crollato negli ultimi anni, rendendoli oggi disponibili a 100-200€.
Prima di entrare nel dettaglio della mia realizzazione, cerchiamo ora di spiegare come e perché il PPS del GPS sia un segnale tanto preciso.
Partiamo dalle origini del segnale.
A bordo dei satelliti della rete GPS vi è un orologio elettronico. Per sua natura e situazione di funzionamento (è pur sempre a bordo di un satellite!) non ha una stabilità intrinseca particolarmente elevata. Ogni stazione di controllo a Terra però, s’incarica di mantenere “in passo” l’orologio del satellite aggiornando il dato temporale con quello disponibile localmente, generato di solito da un oscillatore ad alta stabilità al Cesio. Dato che quest’operazione è eseguita in successione da diverse stazioni, in altre parole da diversi “orologi campione” si ottiene un effetto di media che migliora sensibilmente la stabilità a lungo termine. I satelliti quindi trasmettono (sul lungo periodo) segnali di grandissima stabilità temporale.
Il GPS “domestico”, al suo interno contiene un generatore di clock, di non gran qualità, per motivi di ingombro, costo e risparmio energetico. Il generatore interno è “agganciato” al segnale trasmesso dai vari satelliti e tramite una struttura di tipo PLL software è corretto e sincronizzato (locked) alla media dei segnali ricevuti.
E’ per questi motivi che sul breve periodo il segnale PPS è di media accuratezza, ma mediandolo (ovvero attendendo molti PPS) è possibile ottenere una stabilità e precisione da gran laboratorio nelle nostre case a prezzi da amatore.
Studi comparati, eseguiti presso enti di ricerca governativi, fra un maser ad idrogeno (ad oggi la sorgente di frequenza più stabile nota) ed un GPS, hanno dimostrato come l’errore temporale, è per tempi “brevi” minimo per il Maser, ma in crescita strettamente monotonica, mentre rimane indefinitamente costante per il GPS, che per tempi sufficientemente lunghi (attorno alla settimana) diventa pure vantaggioso!
Questo comportamento, trova giustificazione nella continua correzione del segnale satellite e del relativo effetto di media.
Ora a noi “amatori”, non interessano (per ora) precisioni sotto 1E-9, e quindi una finestra di osservazione di 100 secondi, (sempre secondo gli studi succitati) è sufficiente ad assicurarci la precisione cercata.
Prima di vedere come eseguire misure, vorrei proporvi la mia personale realizzazione di un’unità portabile GPS con uscita PPS
EccoVi di seguito lo schema elettrico:
Il cuore di tutto il sistema è un modulo GPS costruito dalla nota casa Garmin, modello GPS25HLV, disponibile a basso prezzo presso molti rivenditori. Nulla vieta di impiegare moduli di altre case produttrici. Per facilitare la comparazione fra diverse opportunità, riporto di seguito un breve stralcio del data sheet del GPS25….
Il Pin-out:
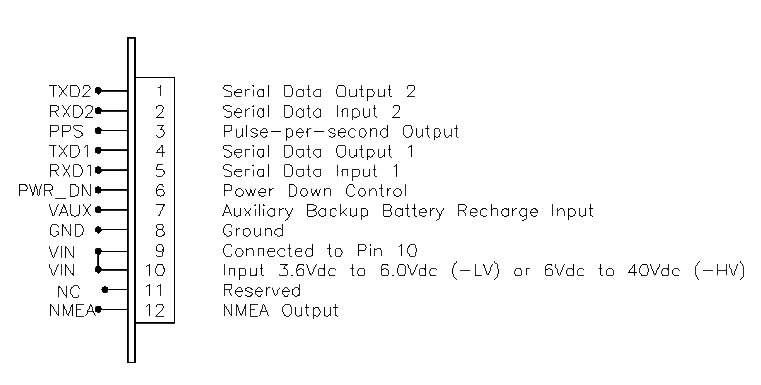
La descrizione funzionale dei pin:

Il sistema prevede un’alimentazione a 220V per uso domestico e funzione caricabatteria. L’accumulatore entrocontenuto permette la trasportabilità dell’unità fuori casa, per misure od operazioni sul campo con una buon’autonomia (alcune ore).
Ho riportato sul pannello frontale tutti i segnali disponibili, anche quelli non fondamentali a questa attività, quali la seriale e la comunicazione NMEA. Il segnale PPS è disponibile esternamente “as-is” ovvero bufferato, utile nel caso di lunghe linee di collegamento o carichi bassi.

Come ottimo partner di questa realizzazione, segnalo il software Tac32, disponibile “in prova gratuita per 30 giorni” sul sito http://www.cnssys.com/tac32/. Questo permette, oltre alla visualizzazione di tutti i parametri classici, la sincronizzazione dell’orologio del PC al GPS e la costruzione dell’orizzonte radio visto dall’antenna GPS.
L’uscita PPS del modulo è disponibile direttamente in uscita, ovvero tramite un buffer Cmos, e pilota un led per la visualizzazione degli impulsi stessi.
Vediamo ora alcune applicazioni del sistema.
Calibrazione di un contatore:
Si regimi per un tempo sufficiente il GPS e soprattutto il contatore, in modo da limitare gli effetti di deriva termica. Si setti il contatore come periodimetro e si colleghi il segnale PPS al suo ingresso. Il valore atteso deve giacere nell’intervallo 1.000.000.000 ± 100 nS.

Nel caso in cui un limitato numero di digit non permettesse di leggere tutto il numero di cifre necessario, si proceda mandando “fuori scala” il contatore, ricordandosi ovviamente, il numero di cifre non più visualizzate.
Se la lettura è al di fuori della banda prevista, si può procedere alla correzione della base dei tempi del contatore ovvero all’annotazione dell’errore stesso se non compensabile.
Questo però non basta, poiché ci siamo prefissi l’obiettivo di un errore di 1 Hz per GHz. Come fare dunque? Come detto, la precisione media del PPS migliora col tempo, in maniera lineare. E’ quindi raggiungibile un’accuratezza di 1E-9 con un tempo di media di 100”. Si setti quindi il contatore per mediare il periodo di 100 impulsi di ingresso. L’uscita attesa deve giacere nell’intervallo 1.000.000.000 ± 1 nS.

Come sopra, se siamo fuori dell’intervallo atteso si corregga la base tempi di conseguenza.
Tutto quanto detto, vale solo nel caso di lettura più stabile dell’errore letto.
Ad esempio, una sequenza di misure del tipo: 1.000.000.035 nS, 1.000.000.041 nS, 1.000.000.031 nS c’indica che potremo recuperare una trentina di parti per miliardo di precisione, ma la scarsa stabilità non permetterà precisioni migliori di ± 5E-9, cioè un errore di qualche Hz per GHz letto.
In questo caso, potremo cercare di avvicinare il valore medio letto a quelli atteso, magari mediando molto e ripetendo la misura a distanza di tempo.
Si può convenire che per precisioni elevate, la procedura diventa perlomeno lenta, ma sempre meno che scrivere tutti gli 0 occorrenti su un assegno per un generatore di classe equivalente!
Base tempi per un oscillatore ad alta frequenza:
Questa è un’applicazione tutta dedicata agli amanti delle microonde. Oggigiorno è possibile progettare e realizzare oscillatori quarzati di classe, ben termostatati e abbastanza stabili. Il problema grosso rimane la loro regimazione, e l’esposizione a condizioni termiche avverse, quali, ad esempio, quelli dei beacon.
In questi casi, si può usare il segnale PPS del GPS, come base tempi per entrare opportunamente scalati, in un anello PLL a lunga costante di tempo, per non introdurre rumore nell’oscillatore ma tenerlo “guidato” nel corso delle ore e dei mesi (estate/inverno). Questa tecnica, definita dagli anglosassoni “disciplined oscillator”, combina i pregi della pulizia spettrale degli oscillatori a quarzo colla stabilità a lungo termine di un PLL agganciato a un generatore ad alta stabilità.
Di quest’applicazione non ho fatto un riscontro sperimentale, ma solo un’analisi sintetica in simulazione.
Per vedere come funzionerebbe il sistema, ho costruito un semplice modello di trasmettitore a 10 GHz, con Simulink:
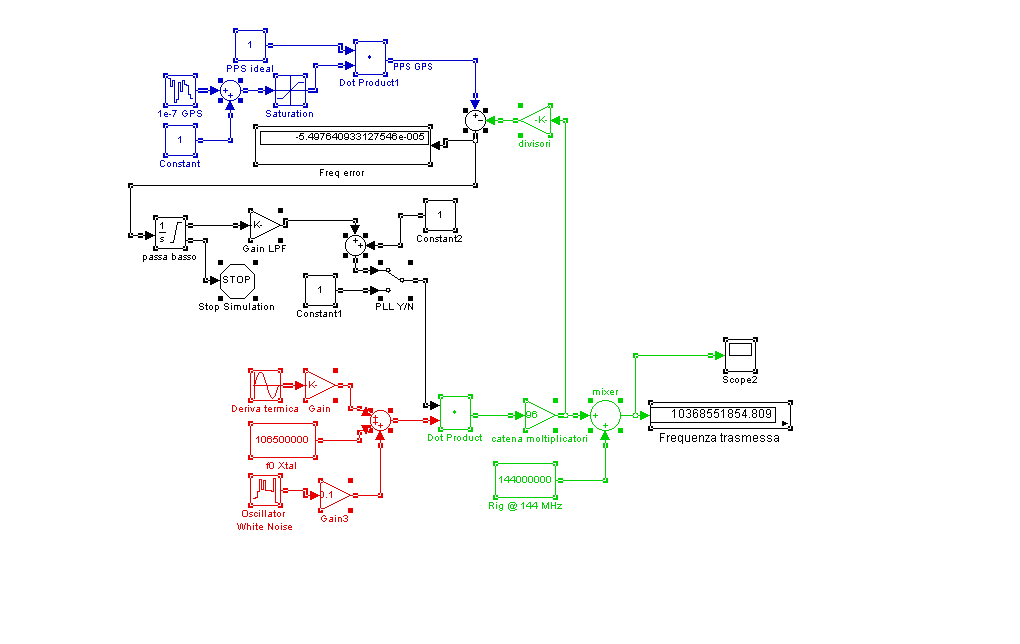
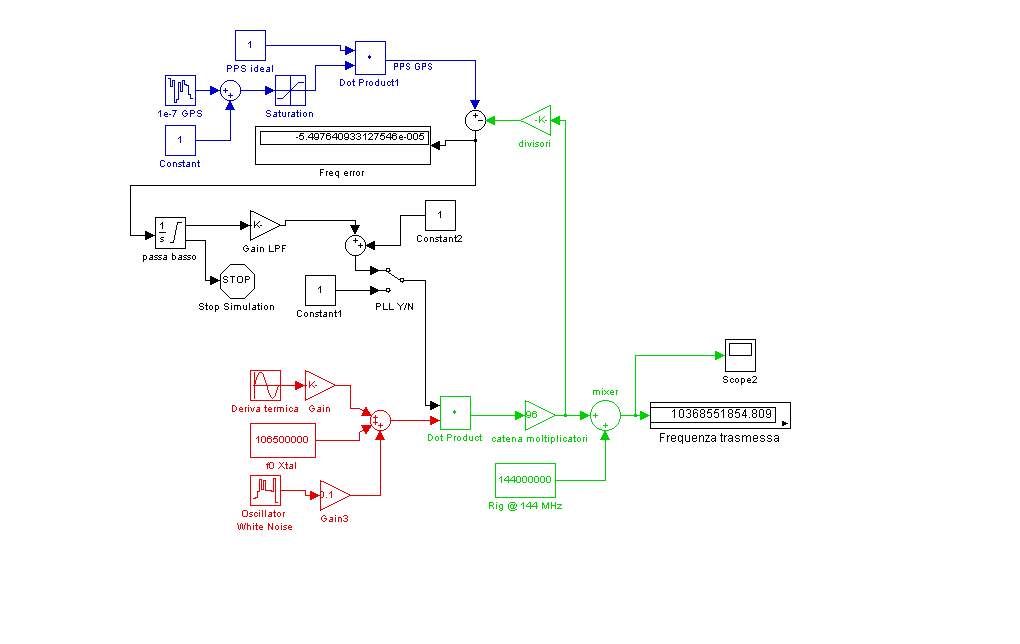 In rosso l’oscillatore locale a 106.5 MHz, con un po’ di rumore proprio e una lenta deriva di 20 kHz p-p con periodo di circa 100 minuti, attribuibile ad esempio a motivi termici. In verde, la catena dei moltiplicatori, mixer trasmissione, divisori, etc. In blu, il PPS del GPS colla sua varianza; in nero il “PLL lento”.
In rosso l’oscillatore locale a 106.5 MHz, con un po’ di rumore proprio e una lenta deriva di 20 kHz p-p con periodo di circa 100 minuti, attribuibile ad esempio a motivi termici. In verde, la catena dei moltiplicatori, mixer trasmissione, divisori, etc. In blu, il PPS del GPS colla sua varianza; in nero il “PLL lento”.
Vediamo nei due seguenti grafici il diverso comportamento della frequenza di trasmissione nel caso di oscillatore libero e “disciplinato” dal GPS.
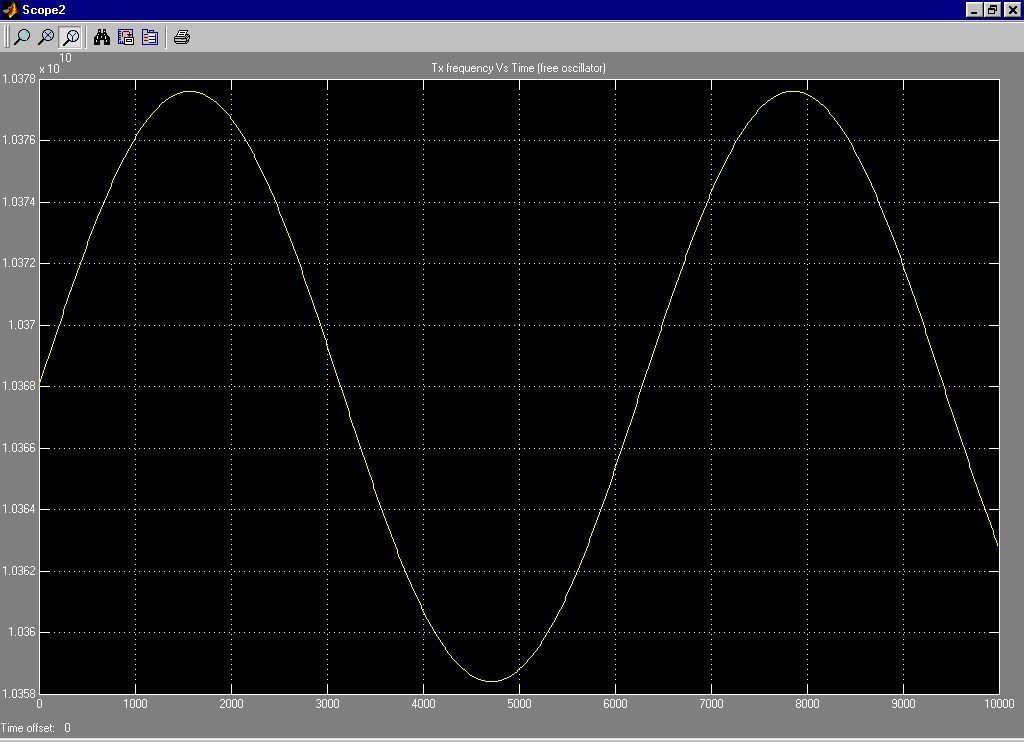
Per poter essere meglio comparate, tutte e due le simulazioni hanno le stesse scale. In ascisse il tempo, 10000 secondi fondo scala e in ordinate la frequenza da 10358 a 10378 MHz.

E’ subito evidente il drastico miglioramento della stabilità a lungo termine, già senza alcun’ottimizzazione del sistema di controllo.
Spero con questo lavoro di aver suggerito qualche buon’idea e di aver contribuito a qualche soluzione.
Non finirò mai di ringraziare il “buon” Roberto Ambrosini, I4AOR, amico e maestro, che quale “padre dell’idea” mi ha permesso di crearmi un po’ di cultura in materia e mi guidato passo passo nello sviluppo.
A tutti buon lavoro.
Pierluigi Poggi
We dentiifely need more smart people like you around.